Education

Bachelor of Technology
Indian Institute of Technology, Kanpur
Mechanical Engineering
2017-2021

Master of Science
Carnegie Mellon University
Artificial Intelligence & Robotics
2021-2022
I am a Machine Learning and Computer Vision Engineer at Qualcomm. I am passionate about the application of classical Computer Vision and Machine Learning techniques to solve real world problems. If you are interested in learning more about me, feel free to reach out!
Navodit Chandra's Resume Bachelor of Technology
Indian Institute of Technology, Kanpur
Mechanical Engineering
2017-2021
Master of Science
Carnegie Mellon University
Artificial Intelligence & Robotics
2021-2022

Machine Learning and Computer Vision Engineer
Qualcomm, Hyderabad, India
June 2023 - Present
Graduate Researcher
Carnegie Mellon University, Pittsburgh, USA
May 2022 - Dec 2022

Research Internship
IIT Kanpur, Kanpur, India
May 2019 - July 2019

Robotics Club
IIT Kanpur, Kanpur, India
May 2018 - July 2018
In order to navigate a road intersection safely and with efficient performance a self-driving car needs to aware of the 3D context of the scence. To achieve this, dependencies in feature maps captured by different sensors such as cameras and LiDARs can be achieved by making use of neural network topologies such as transformers. In an attempt to enhance the driving performance, I experimented with different kinds of attention mechanisms such as Self Attention, Cross Attention and Convolutional Block Attention Modules. I found out that the Self-Attention module with additive attention to compute the alignment scores worked the best in comparison to the baseline and led to a 9.5% improvement in the Driving Score evaluation metric.
PDF
Keywords: #transformers, #ResNet, #sensor fusion, #CARLA, #PyTorch, #Python
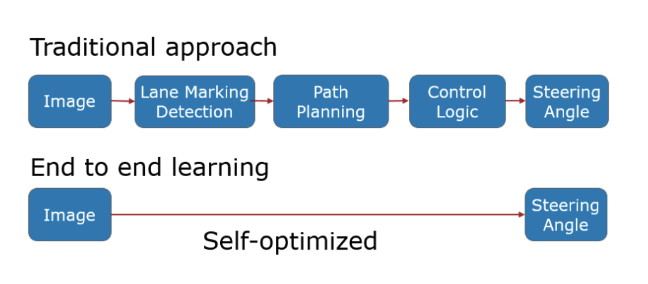
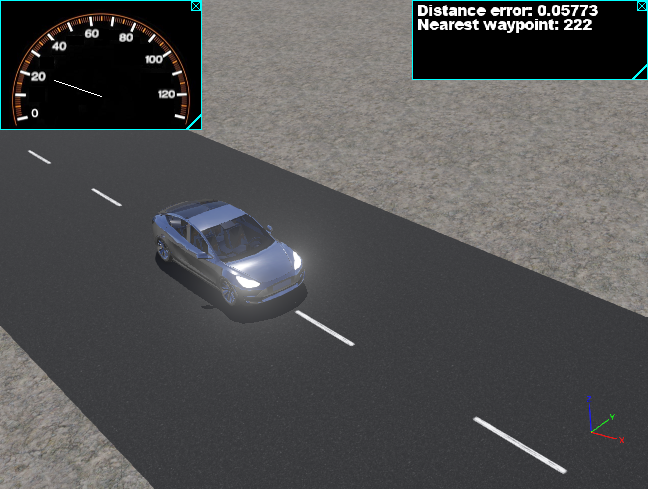
For the final project in my Deep Learning class at Carnegie Mellon University during Spring 2022, I worked on an interesting problem to make a self-driving car steer itself on the basis of the images captured by the camera mounted on it. The end-to-end learning approach is a blackbox and obviates the need to solve individual subproblems such as control, planning, detection of lane markings etc.
PDF Code Slides
Keywords: #autonomous vehicles, #end-to-end learning, #CNN, #CNN-LSTM, #PyTorch, #OpenCV
For the final project in my Trustworthy AI Autonomy class at Carnegie Mellon University during Spring 2022, my team of 3 simualated a real life incident using the Digital Twin technology in which the autopilot system of a self-driving car perceived the moon in the evening sky as a yellow traffic light. An adversarial attack algorithm was used to perturb the images captured by the RGB camera mounted on the car to fool the car autopilot system. We also came up with adversarial defense techniques to avert the occurrence of such incidents.
PDF Code Poster
Keywords: #digital twin, #adversarial attack, #image processing, #adversarial defense, #PyTorch, #OpenCV


For the final project in my Computer Vision class at Carnegie Mellon University during Spring 2022, my team of 3 developed an algorithm that could take readings from seven-segment display electronic devices using image processing operations and computer vision techniques. The algorithm was instrumental in speeding up the process of taking readings by a factor of 10.4 and improving the accuracy by 7.8% in comparison to average computer typists.
Code Slides
Keywords: #seven-segment digit recognition, #image processing, #bounding box, #python, #OpenCV
For the final project in my Machine Learning and Artificial class at Carnegie Mellon University during Fall 2021, my team of 3 applied feature engineering to deduce the minimum number of features required to predict whether a breast tumour was malignant or beningn. The following shallow machine learning algorithms- Logistic Regression, Random Forest, Gaussian Naive Bayes and K-Nearest Neighbor were implemented and their accuracy and time of execution for making a prediction was compared.
PDF Code Slides
Keywords: #binary classification, #feature engineering, #shallow machine-learning, #python, #scikit-learn

In my class on Modern Control - Theory and Design in Fall 2021, I designed longitudinal PID and lateral PID, full state feedback and optimal controllers for a ground vehicle. In addition to that, I designed a baseline LQR controller to fly a quadrotor in absence of motor failure and a Model Reference Adaptive Controller to fly it when there is risk of motor failure
Code
Keywords: #PID control, #state feedback control, #optimal control, #stochastic control, #adaptive control
In my class on Advanced Control Systems Integration in Fall 2022, I designed an inner loop PID controller for balancing the robot using accurate measurements of inclination from vertical by constructing a complementary filter for fusing accelerometer and gyroscope data. I also designed outer loop PID and MPC controllers for trajectory tracking while maintaining a separation of 20 cm between robots moving in a platoon
PDF Code Slides
Keywords: #robot platooning, #trajectory tracking, #PID, #LQR, #MPC

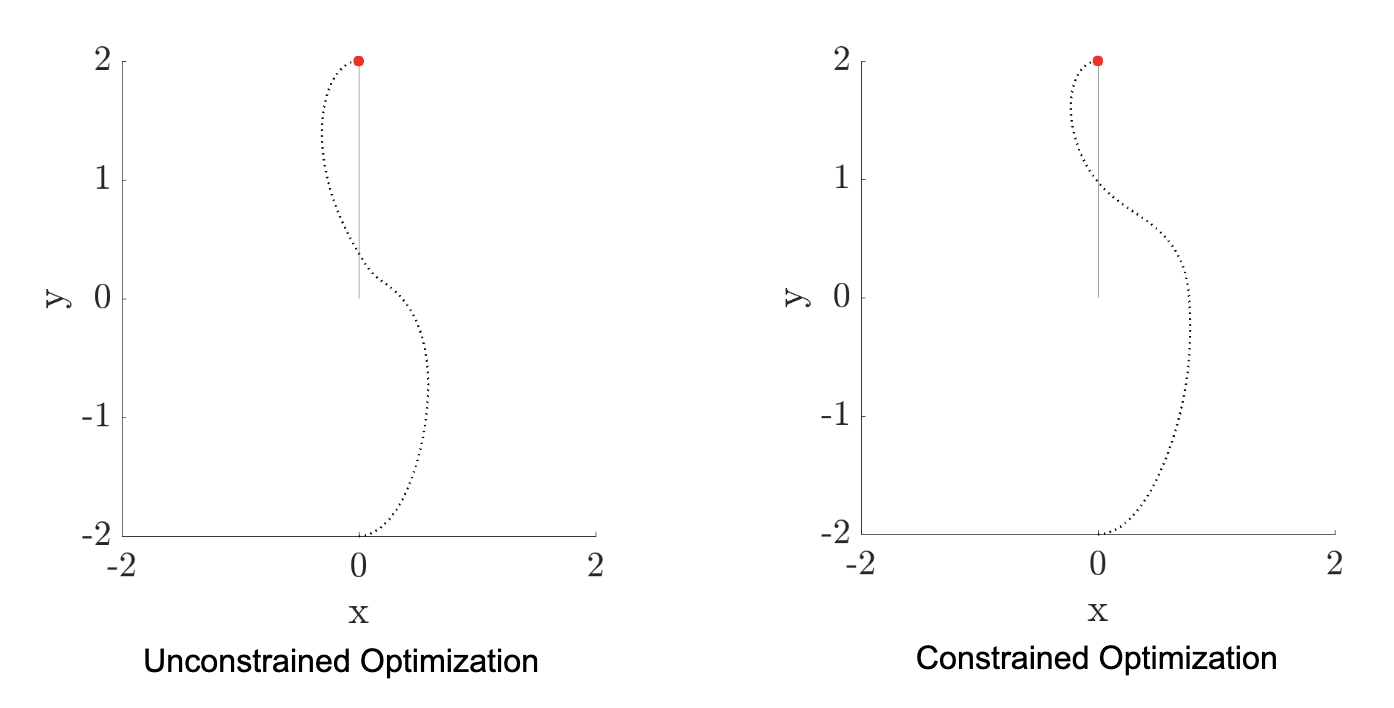
In my class on Robot Dynamics and Analysis in Fall 2021, I implemented a direct collocation trajectory optimization problem for a 2 link robot manipulator using the fmincon method in MATLAB. The robot manipulator was made to move from an initial state to a final state both when joint limits were imposed (constrained optimization) and not imposed (unconstrained optimization).
Code
Keywords: #PEM fuel cells, #gas velocity, #operating current, #surface wettability, #capillary number
During Summer 2019, I worked on the study of water management in PEM fuel cells which generaate electric power by an electrochemical process. The effect of gas velocity, operating current, surface wettability and capillary number on the operation of the PEMFC was studied by means of a parametric stduy and the changes in the water removal rate and energy lost in the gas flow channels was analysed from simulations.
PDF Poster
Keywords: #PEM fuel cells, #gas velocity, #operating current, #surface wettability, #capillary number
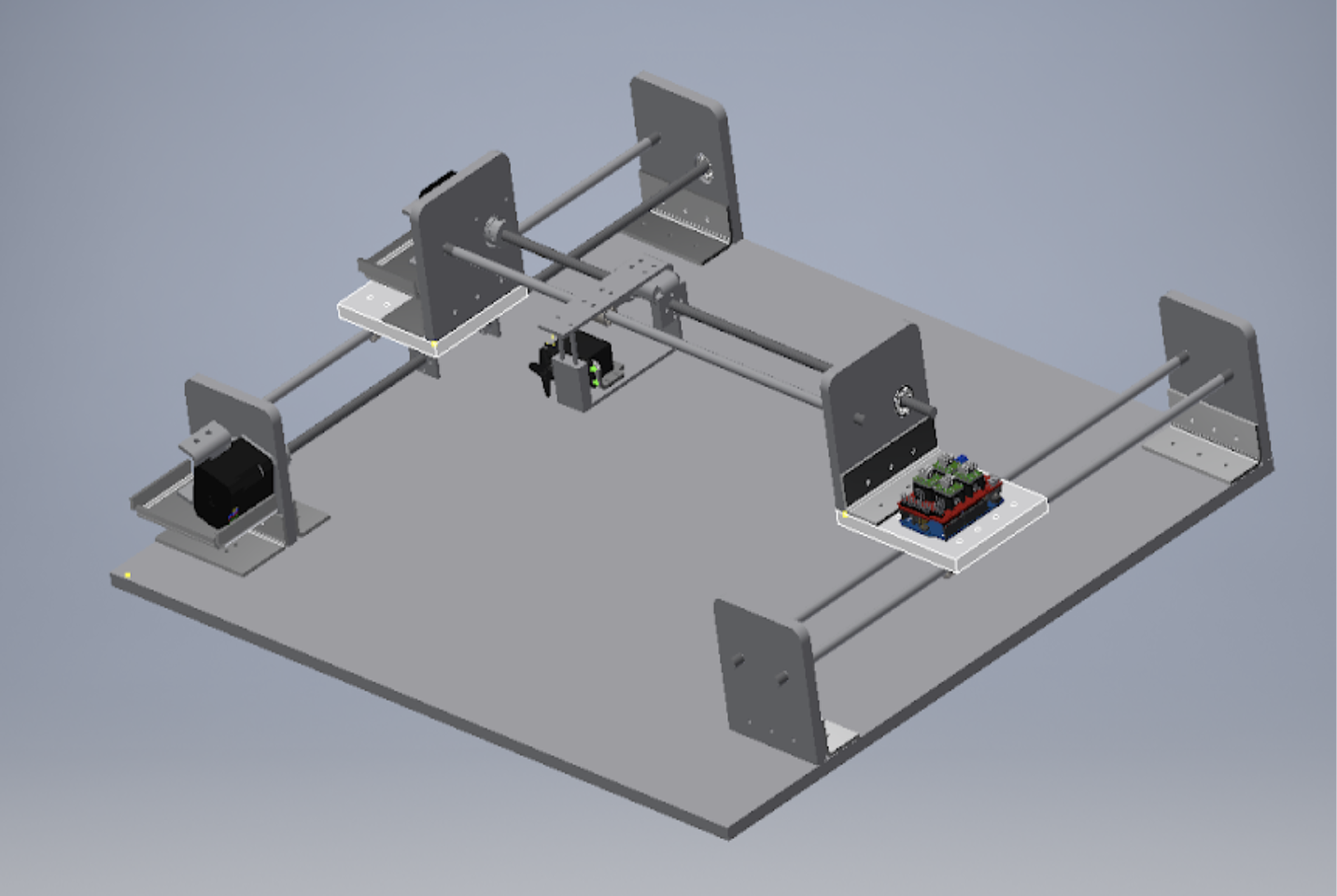
During summer 2018, I worked in the software team of the project Sketching Buddy- a 2D CNC printer which could make sketches of digits, letters etc. provided to it as input. I developed the Arduino code for controlling the movement of the stepper motor along the X and Y axes and the servo motor along the Z axis.
PDF Slides
Keywords: #CNC printer, #arduino, #stepper and servo motor, #mechanical subsystems, #CAD